独立操縦プーリー
Belt Technologiesは、平ベルトトラッキングの革命的な概念である独立操縦プーリー(ISP)を開発しました。このプーリーは、以下のシステム設計に使用できます。
- ISPがアイドラーまたはドリブンプーリーである2つのプーリーコンベヤシステム
- 共通のシャフトに複数のアイドラープーリーがあるシステム
- 曲がりくねった、または複雑なベルトパスによるシステム
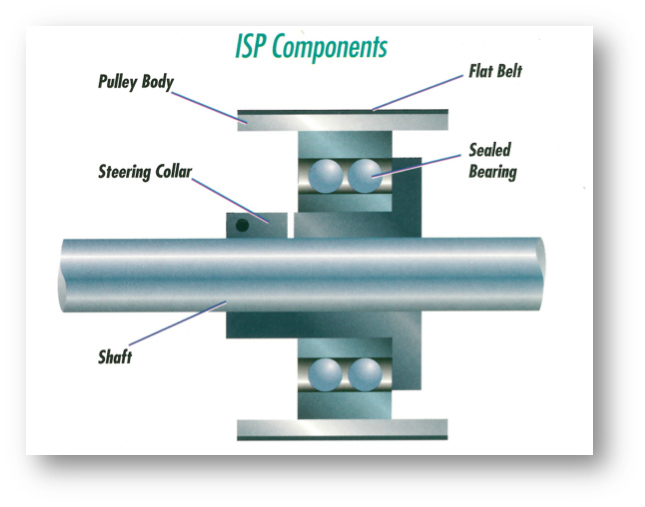
- ISPによる平ベルトのステアリング – ベルトに関連するプーリーの角度を調整することで、ベルト幅の張力関係を変化させるコンセプトに基づく
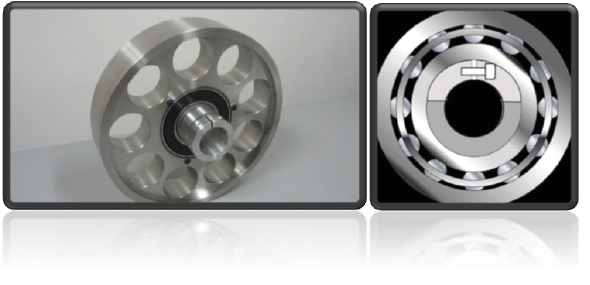 PureSteel® ISPは、ピローブロックの調整でプーリーシャフトを左右または上下に動かすのではなく、可変ステアリングカラーやシールベアリングアセンブリをプーリー本体に備えています。このステアリングカラーは、スキューボアまたはオフセットボアのいずれかで設計されています。回転時に、カラーがプーリー本体の角度を変え、プーリー面を横切るベルトを管理したり双方向に動かしたりできます。
PureSteel® ISPは、ピローブロックの調整でプーリーシャフトを左右または上下に動かすのではなく、可変ステアリングカラーやシールベアリングアセンブリをプーリー本体に備えています。このステアリングカラーは、スキューボアまたはオフセットボアのいずれかで設計されています。回転時に、カラーがプーリー本体の角度を変え、プーリー面を横切るベルトを管理したり双方向に動かしたりできます。 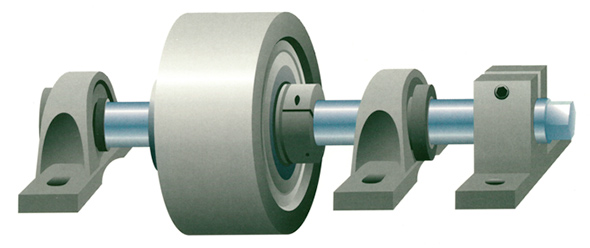 PureSteel®ISPは弊社でのみ利用可能で、平金属ベルトのステアリングを容易にします。ユーザーがISPステアリングを従来のベルトトラッキング設計のクラウニング、フランジング、タイミングエレメントと組み合わせることで、指定されたトラッキングパラメータにベルトを効果的かつ正確にステアリングできる相乗作用のあるベルトトラッキングシステムを実現します。
PureSteel®ISPは弊社でのみ利用可能で、平金属ベルトのステアリングを容易にします。ユーザーがISPステアリングを従来のベルトトラッキング設計のクラウニング、フランジング、タイミングエレメントと組み合わせることで、指定されたトラッキングパラメータにベルトを効果的かつ正確にステアリングできる相乗作用のあるベルトトラッキングシステムを実現します。
ISP独自の特徴と利点
- 平ベルトは、ステアリングカラーを回転することで素早くトラッキングされます
- ISPの設計は、生産機械のベルトを交換する際のダウンタイムを減少します
- ISPのシステムは使用しやすいため、特別な工具や訓練が不要です
- ISPは、平ベルトを使用する際のコンベヤシステムの設計や組み立てを容易にします
- 既存のアイドラープーリーは、大幅なシステム変更を行うことなく、ISPに組み込むことができます。
- ベルトトラッキングパラメータが確立されると、メンテナンスが不要になります
- ISPは、フランジやタイミングプーリーの使用時の側面の負荷を最小化することで、ベルト寿命を延ばします
設置と使用
PureSteel® ISPは、市販のピローブロックを使用しているシステムフレームに取り付けます。シャフトが回転しないようにクランプを使用します。 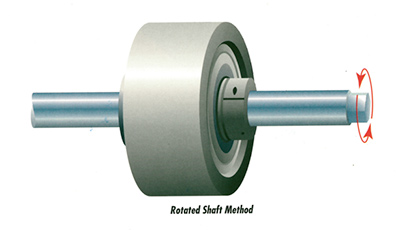
ISP平ベルトトラッキングの回転軸方式は、
- シャフトに単独でプーリーがあるシステムに使われています
- プーリー本体がキャップ付きチューブ設計である時、必ず使われています
- 複数のプーリーが共通のシャフト上にある時は使われません
- ISPが複数のプーリーシステムのステアリングロールである時に、選択的に使われています
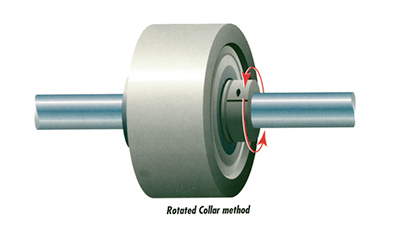 実際に使用するためには、ISPに内蔵されているスプリットカラーを使用したり、ネジを閉めたりしながら、ISPをシャフトに固定します。シャフトとカラーを一体にして回転します。希望のトラッキング特性が得られたら、シャフトクランプを固定してシャフトが回転しないようにします。プーリー本体が、ISPアセンブリに内蔵されたベアリングの周りを回転し始めます。この方法により、ベルトに張力をかけたまま動作しながらトラッキングができます。
実際に使用するためには、ISPに内蔵されているスプリットカラーを使用したり、ネジを閉めたりしながら、ISPをシャフトに固定します。シャフトとカラーを一体にして回転します。希望のトラッキング特性が得られたら、シャフトクランプを固定してシャフトが回転しないようにします。プーリー本体が、ISPアセンブリに内蔵されたベアリングの周りを回転し始めます。この方法により、ベルトに張力をかけたまま動作しながらトラッキングができます。
ISP平ベルトトラッキングの回転カラー方式は、
- 共通のシャフトに複数のプーリーがある時、各ベルト/プーリーの組み合わせを個々に調整するのに使われています
- 曲がったベルトや、複雑なベルトパスシステムによく見られる片持ち軸がシステムにある時に使われています。ベルトが静止している時にのみ、これらの調整を行うことを推奨しています
共通のシャフトに複数のプーリーがある時、各ベルト/プーリーの組み合わせを個々に調整するのに使われています • 曲がったベルトや、複雑なベルトパスシステムによく見られる片持ち軸がシステムにある時に使われています。ベルトが静止している時にのみ、これらの調整を行うことを推奨しています
お客様に最適な設計とは
この新製品は、多くの用途で使用できます。弊社では、お客様のニーズに合う独立操縦プーリーを設計・製造いたします。 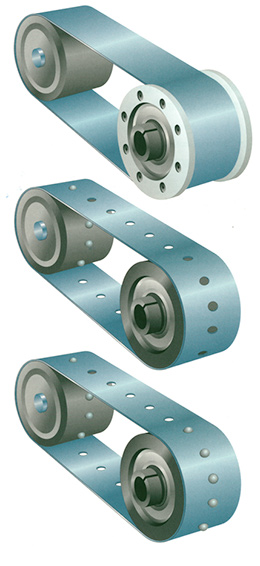
PureSteel®システム構成No.1
- ISPは摩擦駆動プーリー です。テフロンフランジはプーリー本体に取り付け、横方向に制限をもたらします。ISPのステアリング特性により、ベルトの片端をフランジに配置し、ベルトの横方向の負荷を最小限にします。
- トラッキング精度は、762 mm(0.030インチ)またはそれ以上です。
PureSteel® システム構成No.2
- ISPは摩擦駆動プーリー です。ドライブプーリーの歯とベルトのパーフォレーションが横方向に制限をもたらします。ISPのステアリング特性により、ベルトパーフォレーションの横方向の負荷を最小限にします。
または、
- ISPは摩擦駆動プーリー です。ISPの歯とベルトのパーフォレーションにより、ISPのステアリング特性でベルトの正確なトラッキング制御を行い、ベルトパーフォレーションの横方向の負荷を最小限にします。この場合、トラッキング精度は、金属ベルトの場合で203 mm(0.008インチ)から0.381 mm (0.015インチ)の間になります。
ドライブプーリーとドリブンプーリーの両方でタイミングエレメントを持つことは、一般的に推奨されていませんが、この設計では、プーリー表面に微粒子が堆積することでベルトのトラッキング特性が継続的に変化しているプーリー間や適用部分における中心距離が長い金属ベルトシステムで、選択的に使用できます。

Belt Technologies – Independently Steerable Pulleys
We are pleased to offer you the opportunity to download Belt Technologies – Independently Steerable Pulleys in PDF format. (Adobe Acrobat Reader is required, high-speed internet connection is recommended.)
